 Overview
OverviewAbstract
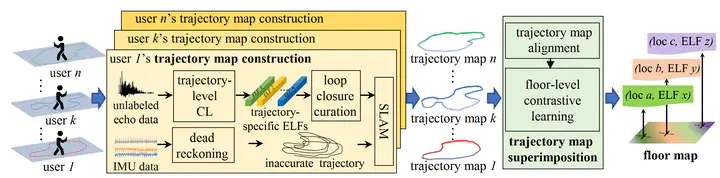
Indoor self-localization is a highly demanded system function for smartphones. The current solutions based on inertial, radio frequency, and geomagnetic sensing may have degraded performance when their limiting factors take effect. In this paper, we present a new indoor simultaneous localization and mapping (SLAM) system that utilizes the smartphone’s built-in audio hardware and inertial measurement unit (IMU). Our system uses a smartphone’s loudspeaker to emit near-inaudible chirps and then the microphone to record the acoustic echoes from the indoor environment. Our profiling measurements show that the echoes carry location information with sub-meter granularity. To enable SLAM, we apply contrastive learning to construct an echoic location feature (ELF) extractor, such that the loop closures on the smartphone’s trajectory can be accurately detected from the associated ELF trace. The detection results effectively regulate the IMU-based trajectory reconstruction. Extensive experiments show that our ELF-based SLAM achieves median localization errors of 0.1m, 0.53m, and 0.4m on the reconstructed trajectories in a living room, an office, and a shopping mall, and outperforms the Wi-Fi and geomagnetic SLAM systems.
Wenjie Luo
Ph.D
My research interests lie in improving the performance/efficiency of artificial intelligence (AI) powered Internet of things (IoT) systems.